
本文图片来源 :北京奥特思技术有限公司
PLC作为工业自动化控制系统中的核心成员,是在控制领域被普遍采用,且可使工业生产变得高效、智能和安全的最基本的支柱型产品。
据相关统计,PLC国内市场总量超过百亿,其应用范围囊括电力、交通、石化、冶金、工程机械等众多关系国计民生的领域。其中,国外品牌PLC产品市场占比超过80%,仍占据主导地位;占比较低的国内品牌PLC产品则较长时间内处于跟跑状态,不仅市场份额存在明显差距,底层技术也根基不稳——绝大部分国产PLC是基于国外芯片和软件系统开发的,因此打造全栈国产PLC系统解决方案对国内早日实现控制系统安全和供应链安全有着不容忽视的意义。
PLC产品主要由以下三部分组成:PLC的IEC61131-3集成开发环境IDE、PLC主控制器和I/O模块。本文主要围绕其中最为复杂的IEC61131-3集成开发环境IDE和PLC主控制器技术进行阐述,系统结构如图1所示。
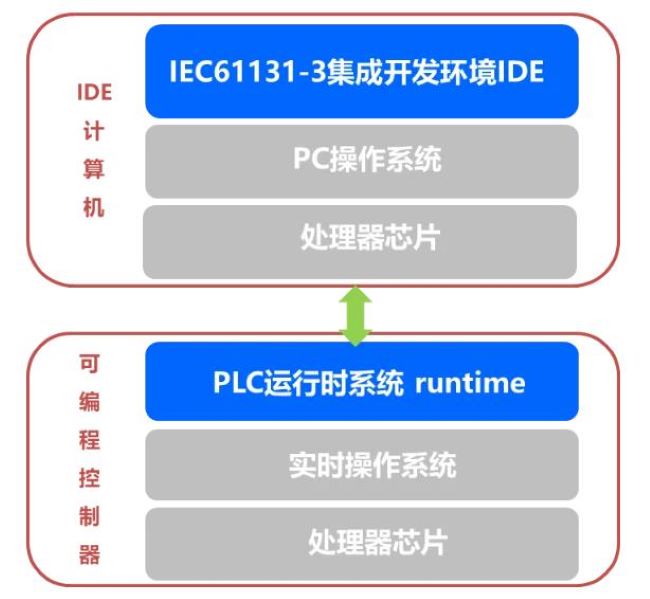
▲图1 PLC集成开发环境IDE和PLC主控制器结构图
PLC集成开发环境IDE是面向自动化工程师开发的工具类基础软件,它运行于PC操作系统之上,为工程师提供了编写和调试PLC程序所必备的开发环境。PLC 集成开发环境的优劣可以从对 IEC61131-3 可编程功能支持的完善度,编译效率的高低,编程和调试的易用性以及系统的开放性等几个维度进行评判。PLC主控制器一般由处理器芯片、嵌入式实时操作系统和PLC运行时runtime组成。PLC主控制器性能主要体现在系统的可靠性、PLC代码执行效率的高低、任务实时性和通讯协议丰富程度等指标上。
基于20年来对PLC/DCS研发和应用的深入理解,北京奥特思技术有限公司自主研发了IEC61131-3可编程系统AnyControl(包含PLC集成开发环境和PLC运行时runtime软件)。AnyControl作为可编程控制器(PLC/DCS等)的核心软件解决方案,可以集成逻辑控制、运动控制、工业通讯协议、物联网通讯协议、人机界面、工业视觉以及行业相关应用算法等,并对这些功能元素进行统一编程和调试。
国内100%自主研发的AnyControl软件搭配国产芯片和操作系统,即可形成全栈国产PLC控制系统解决方案,如图2所示。
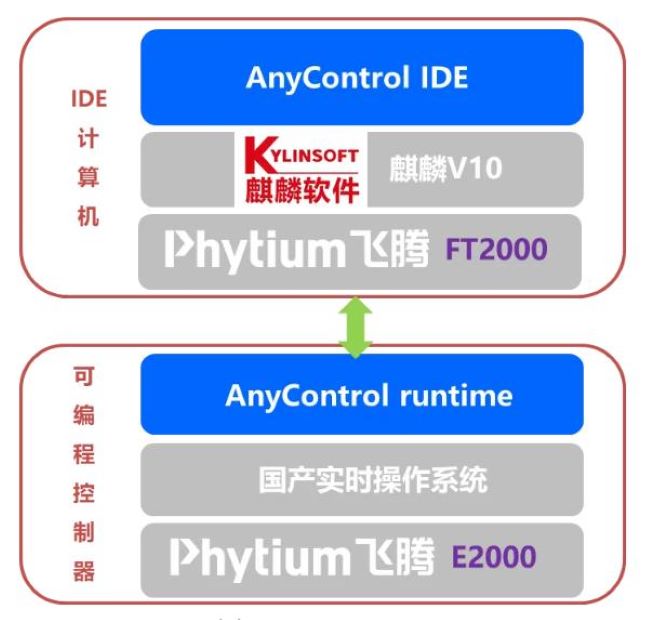
▲图2 全栈国产PLC控制系统解决方案结构图
● AnyControl IDE基于国产飞腾FT2000处理器和国产麒麟V10操作系统
● AnyControl runtime基于国产飞腾嵌入式E2000处理器和国产嵌入式实时操作系统
全栈国产PLC控制系统解决方案
具备如下功能和性能特点
■ 编程语言:
支持梯形图LD、功能块图FBD/CFC、顺序功能图SFC、结构化文本ST、指令表IL,扩展支持高级语言C/C++。
■ 数据组态:
变量名支持中文和英文,支持数组、结构体、功能块和枚举,扩展支持指针类型。
■ 任务组态:
支持任务分配在多核运行,支持多种任务类型(任务类型:周期触发、事件触发、自由运行和中断触发等),任务扫描周期可以达到100us。
■ 热备冗余:
支持控制器双机热备冗余,冗余通讯基于UDP协议,支持双/单冗余通讯链路。
■ 通讯协议:
支持多种工业通讯协议,便于与南北两向设备互联互通。
ModbusRTU主/从
ModbusTCP主/从
CANopen主/从
EtherCAT主站
ProfiNet主站
OPC UA客户端/服务器
Socket通讯(TCP/IP、UDP)
串口自由口协议
CAN自由口协议
控制器间网络变量通讯(基于变量名称)

■ 编程调试:
支持在线变量读写、变量趋势显示、变量值强制、断点调试、在线仿真。

■ 下装无扰:
支持在线更新PLC程序对现场无扰动,包括支持连续版本和非连续版本的在线更新无扰。
■ 运动控制:
支持轴的可视化配置
支持64级运动缓存,支持多种运动衔接模式Buffered modes:Buffered、BlendingPrevious、BlendingNext、BlendingLow、BlendingHigh
支持PLCopen标准的Motion Control功能块:
单轴速度控制、相对位置和绝对位置控制
位置捕捉
联动:电子齿轮和电子凸轮
多轴运动叠加
插补:直线插补、圆弧插补、球弧插补
回零点
行业应用:追剪、飞剪
截至发稿时,该款基于IEC61131-3标准的国产可编程系统AnyControl已成功应用于风电、水电、火电、核电、冶金、军工、自动化产线、运动控制装备、物联网等领域,并形成符合各行业需求的成熟应用案例,产品的可靠性、易用性和稳定性均得到了充分验证,深受用户好评。重点客户如下所示:

